Graphs
1. Overview
Graphs are flexible data structures that use nodes and edges to store information. A graph is a collection of nodes with edges between (some of) them.
Graphs can be either directed or undirected. While directed edges are like a one-way street, undirected edges are like a two-way street.
A graph might consist of multiple isolated subgraphs. If there is a path between every pair of vertices, it is called a “connected graph”.
A graph can also have cycles (or not). An acyclic graph is one without cycles.
- Use Cases:
- Example: Efficient searching and sorting (e.g., database indexing).
- Example: Suitable for priority-based tasks (e.g., heaps for priority queues).
2. Operations and Complexities
| Operation | Time Complexity | Notes |
|---|---|---|
| Depth-First Search (DFS) | O(V + E) | V is the number of vertices. E is the number of edges |
| Breadth-First Search (BFS) | O(V + E) |
Graphs are important — more than you think. Even if you already think they’re important, it’s more than you think.
A tree is a connected graph without cycles, i.e., a type of graph, but not all graphs are trees.
You should know the basic graph traversal algorithms: breadth-first search and depth-first search. You should know their computational complexity, their tradeoffs and how to implement them in real code.
If possible, try to study fancier algorithms, such as Dijkstra and A*. They’re great for just about anything, from game programming to distributed computing, to you name it. You should know them.
Whenever someone gives you a problem, think of graphs. They are the most fundamental and flexible way of representing any relationship, so it’s about a 50-50 shot that any interesting design problem has a graph involved in it. Make sure you can’t think of a way to solve it using graphs before moving on to other solution types. This tip is important!
Representing a Graph
There are three basic ways to represent a graph in memory (objects and pointers, adjacency matrix, and adjacency list), and you should familiarize yourself with each representation and its pros and cons.
Adjacency List
This is the most common way to represent a graph. Every vertex (node) stores a list of adjacent vertices. In an undirected graph, an edge like (a, b) would be stored twice: once in a’s adjacent vertices and once in b’s adjacent vertices.
A simple class definition for a graph node could look essentially the same as a tree node.
class Graph {
public Node[] nodes;
}
class Node {
public String name;
public Node[] children;
}
The Graph class is used because, unlike in a tree, you can’t necessarily reach all the nodes from a single node.
Adjacency Matrix
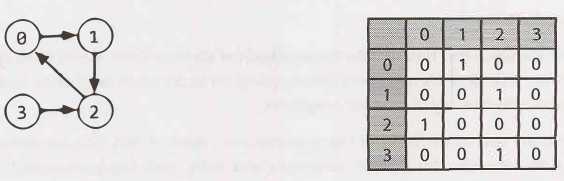
An adjacency matrix is an NxN boolean matrix (where N is the number of nodes), where a true value at matrix[i][j] indicates an edge from node i to node j. You can also use an integer matrix with 0s and 1s.
In an nudirected graph, an adjacency matrix will be symmetric. In a directed graph, it will not (necessarily) be symmetric.
3. Strengths and Weaknesses
| Strengths | Weaknesses |
|---|---|
| Direct access to any element | Example: Memory overhead |
| Example: Supports ordered data | Example: Inefficient for… |
4. Important Techniques
- Ensure you are correctly keeping track of visited nodes and not visiting each node more than once. Otherwise your code could end up in an infinite loop.
5. Must-Know Problems
6. Common Mistakes
Corner cases:
- Empty graph
- Graph with one or two nodes
- Disconnected graphs
- Graph with cycles
7. Cheat Sheet / Key Formulas
Graph Search
If the graph’s structure offers no navigation help, you must visit every node until you find the one you want. The two most common ways to search a graph are depth-first search and breadth-first search.
- Depth First Search (DFS): searching a graph via DFS, we keep following edges going deeper and deeper into the graph. When you reach a node with no edges to any new nodes, you return to the previous node and continue the process.
More information here.
def dfs(matrix):
# Check for an empty matrix/graph
if not matrix:
return []
rows, cols = len(matrix), len(matrix[0])
visited = set()
directions = ((0,1), (0,-1), (1,0), (-1,0))
def traverse(i, j):
if (i, j) in visited:
return
visited.add((i, j))
# Traverse neighbors
for direction in directions:
next_i, next_j = i + direction[0], j + direction[1]
if 0 <= next_i < rows and 0 <= next_j <= cols:
# Add in question-specific checks, where relevant
traverse(next_i, next_j)
for i in range(cols):
for j in range(cols):
traverse(i, j)
- Breadth First Search (BFS): starts at the tree root and explores all nodes at the present depth prior to moving on to the nodes at the next depth level. Extra memory, usually a queue, is needed to keep track of the child nodes that were encountered but not yet explored.
from collections import dequeue
def bfs(matrix):
# Check for an empty matrix/graph
if not matrix:
return []
rows, cols = len(matrix), len(matrix[0])
visited = set()
directions = ((0,1), (0,-1), (1,0), (-1,0)) # right, left, up, down
def traverse(i, j):
queue = dequeue([(i, j)])
while queue:
curr_i, curr_j = queue.popleft()
if (curr_i, curr_j) not in visited:
visited.add((curr_i, curr_j))
# Traverse neighbors
for direction in directions:
next_i, next_j = curr_i + direction[0], curr_j + direction[1]
if 0 <= next_i < rows and 0 <= next_j < cols:
# Add in question-specific checks, where relevant
queue.append((next_i, next_j))
for i in range(rows):
for j in range(cols):
traverse(i, j)S
More information here.
See the below depiction of a graph and its depth-first and breadth-first search (assuming neighbors are iterated in numerical order).
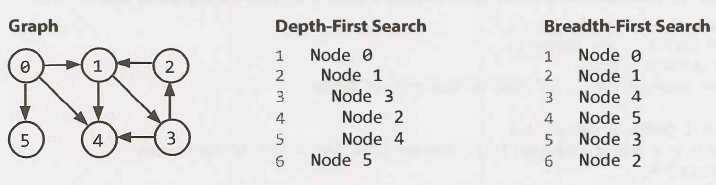
DFS vs BFS
Breadth-first search and depth-first search tend to be used in different scenarios. DFS is often preferred if we want to visit every node in the graph.
If we want to find the shortest path (or just any path) between two nodes, BFS is generally better.
Shortest-Path
- Dijkstra